|
技師報於85年11月18日土木日創刊 新聞局出版事業登記證局版省報字第48號 | ||||
|
| 廣告專線 :(02)8961-3968轉142 傳真:(02)2964-1159,2963-4076 地址:新北市板橋區三民路二段37號A3 網址:http://www.twce.org.tw E-mail:mail@twce.org.tw | NO. 1481 | ||
| ||||
| 從台9線賓朗外環道路新闢工程 談人工智慧危險辨識系統 交通部公路局南區養護工程分局 陳貴芳 分局長、台東工務段 周建勳 段長 長達營造工程有限公司AI技術中心 翁逸宏 顧問、張家榮 技師/董事長 一、 前言 隨著工地的作業規模和人員數量不斷增加,對於傳統的人工監控方法在快速、全面地辨識現場危險上存在顯著限制。工地安全管理多依賴現場人員的觀察和經驗,難以應對現場瞬息萬變的情況和複雜的作業環境,導致監控範圍受限且反應速度不足。為了解決此問題,現代化工程逐步引進人工智慧技術,以提高作業安全性並降低人力監控成本。 本研究開發了一套人工智慧(AI)危險辨識系統,專為時時監控並提出警訊而設計。該系統運用即時影像辨識技術,能自動偵測工地內的潛在危險因素,包括人員未佩戴安全裝備、靠近機具或進入管制區域等狀況,並即時通知管理人員以快速反應,有效提升工地的安全防護。本人工智慧危險辨識系統以「台9線賓朗外環段道路新闢工程」之工地現場實際操作,並於中華民國114年3月1日取得中華民國新型第M667492號專利證書(圖1),藉由危險辨識系統大範圍之即時監控,降低工區所需之人力監控成本並即時警示且通知相關工程人員立即處置,以減少災害之發生。 測試結果顯示,本系統可顯著降低現場人員的風險,實現及時預警,減少意外事故的發生,將施工中偵測規劃之實務作業紀錄編撰成本文,期能達到經驗分享,並提供工程同業參考。
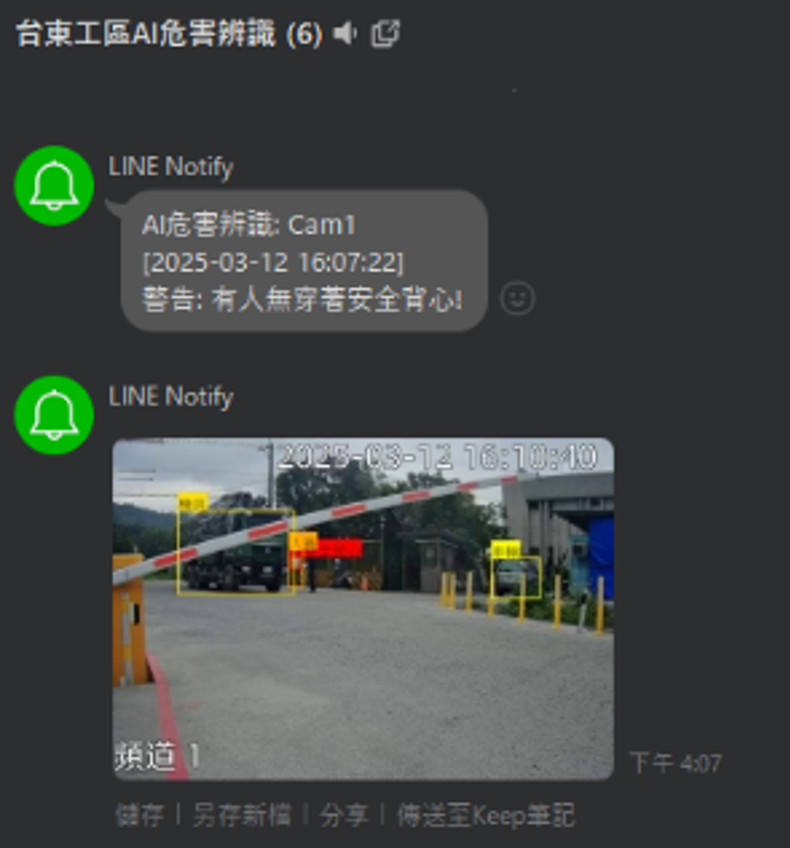
二、系統架構 該人工智慧驅動的危險辨識系統由多個功能模組協同組成,實現工地的即時安全監控。首先,系統中的影像接收模組負責透過網路接收來自工地的即時影像資料,並將原始影像傳遞至後續模組進行分析處理。其高效接收功能確保了影像數據的完整性,為後續的智能影像分析奠定基礎。接下來,智能影像分析模組啟動模型訓練和影像偵測功能,該模組主要使用YOLO物件偵測模型,自動辨識工地環境中的人員、車輛和機具等物件。為了提高小型物件的辨識精度,系統還會將畫面進行後處理,確保工地各項細微變動能被及時捕捉,進一步提升安全監控效果。 當系統辨識出相關目標物後,危險辨識模組會對偵測結果進行即時分析,以辨識出潛在的安全風險因素。該模組即時判斷人員與機具或車輛的距離是否過於接近,並檢查工作人員是否進入管制區域或是否佩戴必要的安全裝備(如安全帽和安全背心)。這一過程旨在降低工地內危險情況的發生概率,並確保現場作業符合安全規範。隨後,應用程式通知模組根據偵測到的風險情況,將警報信息即時發送至管理人員的應用程式,如圖2所示,以便於管理人員能夠即時響應。該模組支援多語言通知功能,適用於不同語言背景的使用者,確保各區域的工地人員均能快速理解警報內容,有助於提升應變效率。
最後,圖3為串流網頁展示模組將危險辨識後的即時影像同步至網頁端,管理人員可以隨時透過瀏覽器查看工地的即時狀況,便於風險事件的監控和應對。該展示模組提供了便捷的監控介面,使管理人員能夠在潛在危險發生時迅速進行判斷與反應,實現全面的安全保障。
三、危害偵測系統相關資訊研擬 (一) 物件偵測技術 本系統採用 YOLO11 模型作為影像辨識的核心技術,該模型以其高效的物件偵測性能和較低的延遲表現,特別適合應用於即時性要求高的場景。為適應建築工地中環境複雜多變的特性,系統針對不同工地需求進行了模型參數的優化,進一步提升偵測精度,使其能準確辨識多種對象,包括車輛、機具、人員、安全錐以及與安全相關的屬性,例如有佩戴安全帽、無佩戴安全帽、有穿著安全背心、無穿著安全背心等。 在實際應用中,系統能夠準確區分出多種物件及其屬性。例如,在辨識人員的同時,系統能即時判斷該人員是否佩戴安全帽或穿著安全背心;對於車輛與機具,則可精確偵測其位置與外形特徵。針對工地特有的安全錐,系統不僅能辨識其位置,還能結合其他模組進行分群分析,用於動態劃定管制區域。 整體而言,基於 YOLO11之影像辨識能力,該系統在多樣化工地環境中展現了高度的靈活性和準確性,顯著提升了對潛在安全隱患的辨識能力。此技術的應用有效降低了人工監控的負擔,並為工地的安全管理提供了即時且可靠的技術支持。 (二) 人員靠近機具之場景辨識 為確保工地內人員的作業安全,系統採用了針對性設計的檢測模組,專門辨識人員是否靠近機具或車輛等潛在危險源。透過 YOLO11 模型對影像中的物件進行即時分類,系統能有效分辨出工地中的人員與機具、車輛等不同類別物件,並結合距離判斷技術評估危險程度。 系統會計算每位人員與機具或車輛之間的水平與垂直距離,並基於安全距離數值判斷是否存在潛在危險。根據人員的尺寸和活動區域,定義出適用於車輛之水平危險距離與垂直危險距離;對於機具,則適當縮小此距離參數。若人員與機具或車輛的距離低於定義的安全閾值,系統將即時生成「靠近機具或車輛」的警告信息。為避免錯誤判斷,系統設計了駕駛員辨識模組,以排除可能在操作機具或車輛的人員。 實測中,系統能準確辨識工地中可能發生的接觸風險。結合危險位置的即時提醒,管理人員可透過應用程式迅速了解工地情況,並採取相應的安全措施。該功能顯著提升了工地的即時監控能力,有助於減少人員與機具或車輛碰撞的風險。 (三) 警戒區管制 在工地中,安全錐等標誌物的位置通常用於劃定危險區域或管制區域,以保護工地人員免受高風險區域的威脅。 在生成管制區域後,系統會進一步監測人員的位置。如果人員進入由安全錐劃定的多邊形區域內,系統即認定該人員進入管制區,並觸發「進入危險區域」的警告信息。 此功能在實測中展現了高效的辨識能力,能即時生成警告並通知管理人員採取必要的行動。例如,當工地環境發生變化(如新增或移除安全錐)時,系統可自動更新管制區域的範圍,確保警戒區域的劃定始終與實際情況保持一致。透過這種動態調整機制,系統不僅能準確劃分高風險區域,還能有效提醒工地人員遠離潛在危險,大幅提升了工地的安全管理水平。 四、實地測試與評估 為驗證系統在真實工地環境中的效能,本系統已部署於台東縣之賓朗外環段道路新闢工程現場進行測試。測試場景具有代表性,包含了大型機具操作、人員密集作業區域及安全錐劃定的危險管制區域等複雜工地環境。 測試結果顯示於 圖4,系統搭載的 YOLO11 模型在辨識安全裝備、監測人員進入管制區域及靠近危險物件方面,達到了良好的辨識效果。其中,模型在 mAP50(平均精度)的指標上達到 0.82,證明其具備高效能的物件偵測能力。此外,模型的偵測精度在處理小型物件(如安全帽和安全錐)及高密度區域的辨識效果上有顯著提升,能夠準確捕捉人員佩戴的安全裝備屬性,以及管制區域內的物件分佈。
在台9線工地測試中,系統成功辨識出多名未佩戴安全帽或安全背心的工人,並即時觸發警報通知管理人員。同時,系統動態生成了基於安全錐位置的管制區域,並監測到有工人進入危險區域,如圖5所示,進一步驗證了系統在即時預警方面的可靠性。在工程現場測試中,系統同樣展現了高準確度,尤其在辨識靠近機具或車輛的人員方面,模型結合距離判斷功能,有效地標識出可能發生的碰撞風險。如圖6所示,系統檢測到一台挖掘機周圍有一名人員進入了預設的危險距離,系統及時發送了「靠近機具」的警告信息。此功能對於提升現場管理者的風險感知能力發揮了重要作用。
整體而言,測試結果表明,本系統在多變且充滿挑戰的工地環境中具備穩定的辨識性能與高效的預警能力。結合即時通知模組與多語系支持,系統為工地安全管理提供了即時、精準且可靠的解決方案,極大地提升了工地的整體安全水平。 五、結語 本研究提出的人工智慧危險辨識系統,透過AI技術整合,顯著提升工地安全管理的自動化與即時性,特別適用於遠距監控與大型工地安全監測。相較於依賴人力巡檢的傳統方式,本系統可全天候自動監測,並結合影像辨識與智慧分析技術,確保安全問題能迅速發現與處理。 系統核心技術為YOLO11 模型,實現對人員、安全裝備、機具及危險區域的全面監控。此外,內建即時通知模組可將辨識結果傳送至監控中心、工地主任、第一線工人,並能與無人機巡邏系統聯動,加速事故定位,提高應變效率,有效降低人員與機具間的潛在危害。 憑藉即時性、自動化與精準性,本系統為工地安全管理提供創新且高效的解決方案。未來將進一步強化智能學習能力,優化應用於更複雜的施工場景,推動工地安全管理的數位化與智慧化。然而,科技僅是輔助工具,安全的關鍵仍在於周密規劃、靈活管理及人員對預警機制的積極配合。唯有結合AI科技與良好安全管理文化,才能最大程度降低風險,確保工程順利進行。 未來,本系統將朝向更高精度、更廣泛應用與更智能化學習發展,重點包括: 1.多樣化通知機制:系統將整合即時通訊平台,確保現場人員即時接收警報,避免因手機未察覺而錯過關鍵通知。 2.強化機具分類與辨識:現有系統可識別機具,未來將細分為挖土機、砂石運輸車、小卡車、連結車、起重機等,提高辨識精度與風險評估能力。例如,若挖土機誤入非施工區域,系統可發出警報提醒。 3.自我學習與環境適應:引入自我學習機制,透過監測數據持續優化模型,確保系統能適應不同施工條件與風險模式。當施工區域變更時,系統可自動調整辨識範圍,提升即時性與準確度。 參考文獻 1. Ultralytics:YOLO11 模型官方文檔與使用指南,https://github.com/ultralytics/ultralytics,2024。 2. Akyon, F. C., Altinuc, S. O., & Temizel, A.: Slicing Aided Hyper Inference and Fine-tuning for Small Object Detection, 2022 IEEE International Conference on Image Processing (ICIP), pp. 966–970, 2022. doi:10.1109/ICIP46576.2022.9897990. https://github.com/obss/sahi 3. Campello, R. J. G. B., Moulavi, D., & Sander, J.:HDBSCAN: Hierarchical Density-Based Spatial Clustering of Applications with Noise,Journal of Machine Learning Research,第17卷,第70期,2013。 4. Redmon, J., & Farhadi, A.:YOLOv4: Optimal Speed and Accuracy of Object Detection,Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition,2020。https://arxiv.org/abs/2004.10934 5. Bochkovskiy, A., Wang, C.-Y., & Liao, H.-Y. M.:YOLOv4: Optimal Speed and Accuracy of Object Detection,2020,https://github.com/AlexeyAB/darknet。 6. Jaccard, P.:The Distribution of the Flora in the Alpine Zone,New Phytologist,第11卷,第2期,1901。 7. Goodfellow, I., Bengio, Y., & Courville, A.:Deep Learning,MIT Press,2016。 8. Harris, C. G., & Stephens, M.:A Combined Corner and Edge Detector,Proceedings of the Alvey Vision Conference,第15卷,第10期,1988。 9. Krizhevsky, A., Sutskever, I., & Hinton, G. E.:ImageNet Classification with Deep Convolutional Neural Networks,Communications of the ACM,第60卷,第6期,2017。此文對深度學習應用於影像辨識的理論和實驗具有深遠影響。 10. Tsai, C.-J., Lin, Y.-H., Chen, C.-M., et al.:利用深度學習於台灣土石流災害監測之應用研究,台灣土石流災害防治期刊,第38卷,第3期,2023。 |
|
|
|
 理事長簡介
理事長簡介 公會服務
公會服務 公會活動
公會活動 創會二十週年專欄
創會二十週年專欄 公會社團
公會社團 技師報
技師報 電子報
電子報 公會相簿
公會相簿 營造廠介聘登記
營造廠介聘登記